RC control
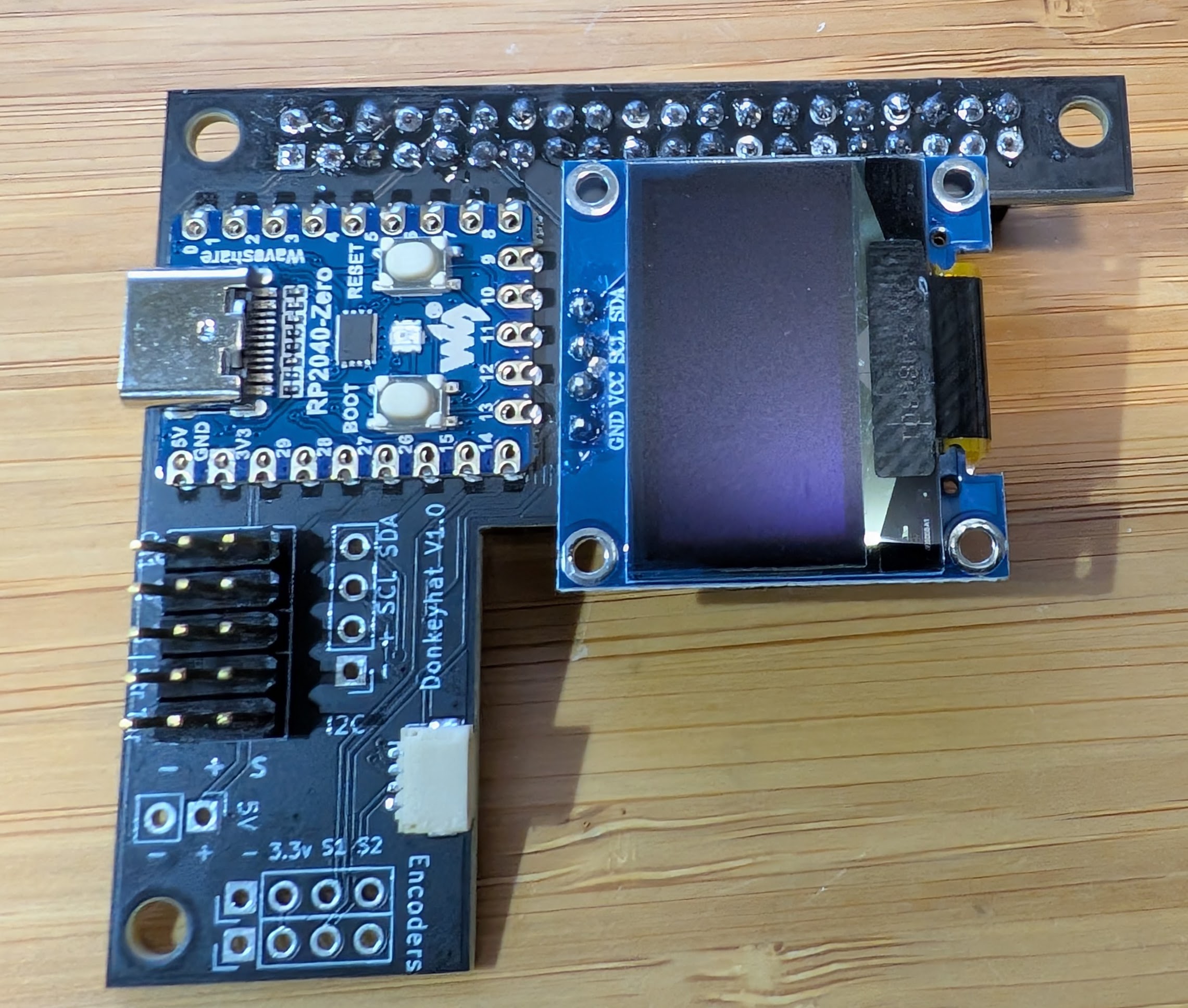
You can drive Donkey with nothing more than the RC controller your car probably came with! To do so, you'll need the official Donkeycar RC Hat, which you can read about (and buy) here
You can drive Donkey with nothing more than the RC controller your car probably came with! To do so, you'll need the official Donkeycar RC Hat, which you can read about (and buy) here